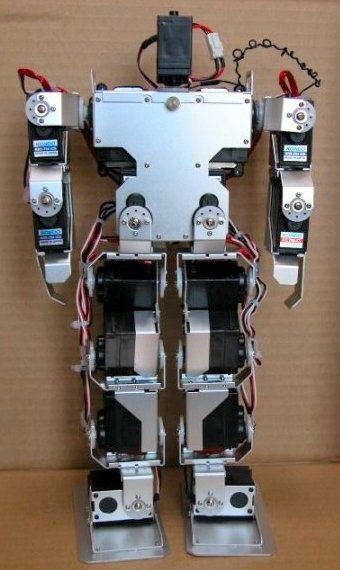
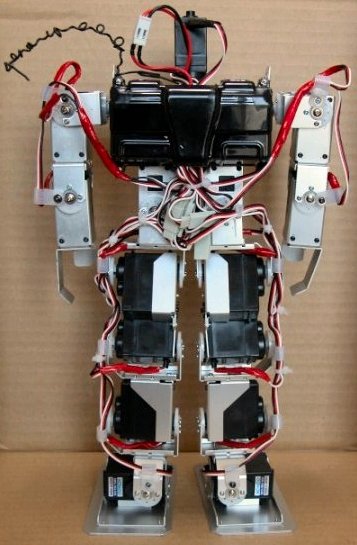
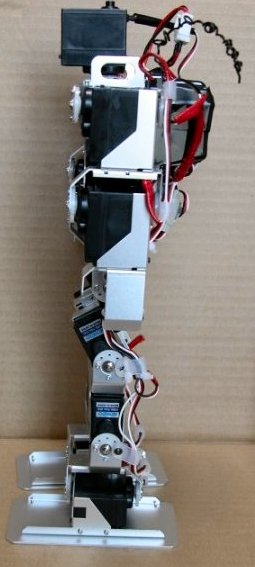
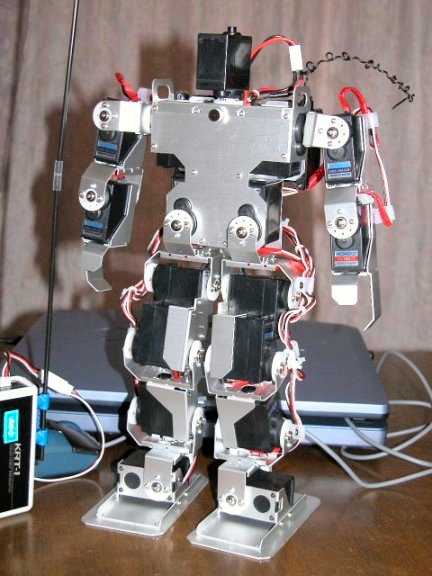
〔近藤科学〕人型ロボットKHR−1
寸法
340 x 180 [mm]
重量
約1.2 [kg] (電池搭載時)
関節数
17
(首1,片腕3x2本,片脚5x2本)
PCとの接続
RS-232Cによる接続、無線
現在行えるモーション
前進
後退
速後退
右ステップ
左ステップ
ホーム→仰向け起き上がり
ホーム→うつ伏せ起き上がり
右旋回
左旋回
早足
駆け足
腕立て伏せ
仰向け起き上がり
うつ伏せ起き上がり
前転
後転
側転
腹筋
挨拶
片足縦バランス
片足横バランス
開脚倒立